Hugging Face vuelve a mover ficha en la carrera por la IA física abierta. La compañía ha presentado LeRobot Humanoid, un robot humanoide bípedo de código abierto diseñado para el aprendizaje robótico y pensado para construirse por unos 2.500 dólares.
El proyecto forma parte de LeRobot, la iniciativa de robótica de Hugging Face, y apunta a un problema muy concreto: la dificultad de probar en hardware real los avances que ya se entrenan en simuladores. Hasta ahora, muchos equipos podían desarrollar políticas de aprendizaje por refuerzo en entornos virtuales, pero llevarlas al mundo físico exigía robots caros, cerrados y difíciles de reparar.
La propuesta de Hugging Face va por otro camino. LeRobot Humanoid no busca ser el humanoide más avanzado del mercado, sino una plataforma accesible, modificable y reparable para investigadores, desarrolladores y comunidades que trabajan en robótica.
Un humanoide pensado para construir, probar y reparar
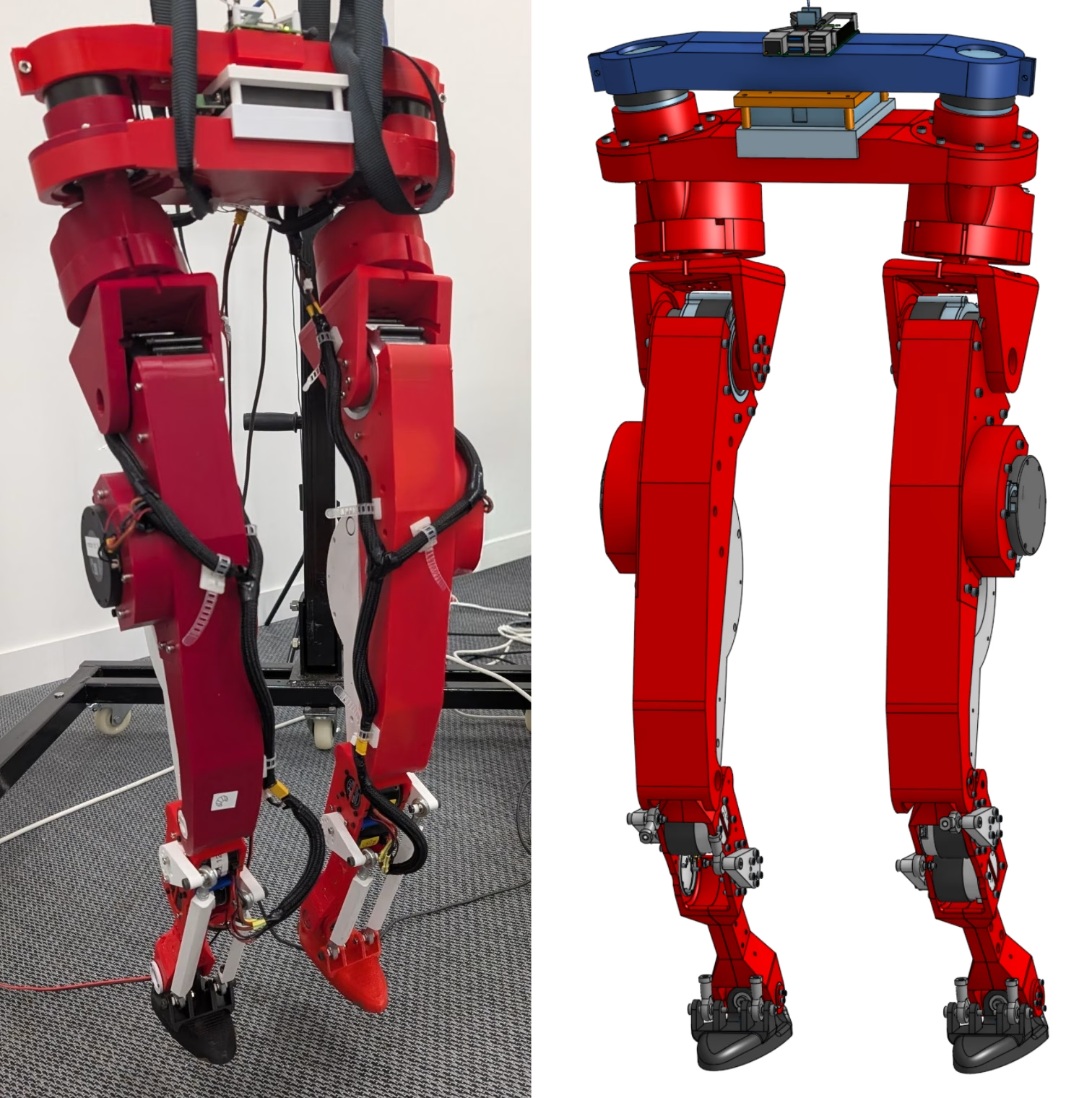
La versión actual de LeRobot Humanoid se centra en la parte inferior del cuerpo, con piernas bípedas fabricadas principalmente mediante impresión 3D. El objetivo inicial es validar el hardware, recopilar datos y avanzar en experimentos de locomoción que conecten la simulación con el mundo real.
El enfoque es importante porque cambia la economía del desarrollo robótico. Si una pieza se rompe durante una prueba, el equipo puede imprimir un repuesto en lugar de depender de componentes propietarios difíciles de conseguir. Eso reduce costes, tiempos de espera y barreras de entrada.
El precio estimado de 2.500 dólares se consigue combinando piezas impresas en 3D, componentes comerciales y actuadores asequibles. Con ello, Hugging Face intenta que la experimentación con humanoides deje de estar limitada a grandes laboratorios o compañías con presupuestos millonarios.
Más que archivos para imprimir en 3D
El lanzamiento no se limita a publicar modelos CAD. Hugging Face plantea LeRobot Humanoid como un ecosistema de pila completa, con herramientas para construir, simular, calibrar y entrenar el robot.
La plataforma incluye una lista de materiales, piezas imprimibles en 3D, documentación de cableado e instrucciones para configurar los motores. También incorpora herramientas de diseño orientadas al control, pensadas para evaluar decisiones mecánicas en simulación antes de pasar al montaje físico.
A esto se suman herramientas de ejecución para calibración, comprobaciones de seguridad y control, además de sistemas de identificación que buscan reproducir datos reales dentro de simuladores. La intención es reducir la distancia entre lo que funciona en pantalla y lo que ocurre cuando el robot se mueve sobre el suelo.
La robótica abierta gana peso en la estrategia de Hugging Face
El lanzamiento de LeRobot Humanoid refuerza la apuesta de Hugging Face por la robótica de código abierto. En los últimos meses, la compañía ha ido construyendo una posición más visible en este campo, con la biblioteca LeRobot, la adquisición de Pollen Robotics y su colaboración con The Robot Studio en HOPEJr, otro humanoide con un precio inferior a los 3.000 dólares.
La estrategia apunta a un mismo objetivo: crear una base común para que más equipos puedan experimentar con modelos de control, locomoción y aprendizaje robótico sin depender de plataformas cerradas. En un sector donde el hardware suele ser caro y frágil, la posibilidad de reparar, modificar e instrumentar el robot se convierte en una ventaja técnica.
Una plataforma experimental, no un producto final
Hugging Face deja claro que LeRobot Humanoid sigue siendo una plataforma de investigación experimental. Trabajar con hardware físico exige calibración precisa, pruebas controladas y mecanismos fiables de corte de energía, especialmente cuando se trata de locomoción bípeda.
La hoja de ruta contempla integrar la parte superior del cuerpo y desarrollar capacidades más avanzadas para movimientos de cuerpo completo. Por ahora, el foco está en las piernas, la puesta en marcha del sistema y las primeras políticas de bipedestación.
Con este lanzamiento, Hugging Face busca algo más que presentar un robot barato. Quiere ofrecer a la comunidad una base física abierta sobre la que probar ideas, romper piezas, corregir errores y volver a intentarlo. En robótica, esa capacidad de iterar rápido puede ser tan importante como el propio algoritmo.