En un sector donde suele construirse primero la máquina y afinar después el software, Sunday Robotics eligió invertir el orden. El proyecto de su robot Memo nació desde una investigación centrada en la captura de datos sobre el movimiento humano, y el diseño físico fue la consecuencia de ese trabajo previo iniciado en el ámbito académico hace varios años.
El primer hito fue el desarrollo de una herramienta propia, el Universal Manipulator Interface, un guante diseñado para registrar la geometría y los gestos de la mano. Antes de definir el cuerpo del robot, el equipo completó cerca de un centenar de iteraciones del dispositivo para afinar precisión y ergonomía. Cuando a finales de 2024 se presentó la primera propuesta formal de Memo, ya se habían validado más de 30 versiones funcionales del sistema de captura.
Datos antes que robots operativos
Este enfoque se aparta del modelo habitual basado en teleoperar prototipos físicos para ir generando datos a medida que el robot existe. Sunday Robotics optó por acumular primero trayectorias humanas reales, de forma que los modelos de control pudieran entrenarse sin depender de un robot plenamente operativo desde el inicio.
La empresa defiende que esta metodología permite generar millones de secuencias de entrenamiento precisas, ampliando la base de aprendizaje antes de fijar la arquitectura mecánica definitiva. ¿De qué sirve un robot si todavía no se entiende del todo cómo debe moverse?
Ajustes de ingeniería durante el diseño de Memo
En la fase de validación se revisaron aspectos críticos desde la cinemática robótica, como las singularidades, puntos donde ciertos movimientos pueden volverse inestables o exigir velocidades extremas. Un diseño inicial situaba lateralmente el eje de giro del hombro, lo que podía llevar al codo a posiciones problemáticas.
Tras analizar esos riesgos, los ingenieros reorientaron el eje hacia arriba para mejorar la estabilidad del sistema. Ese cambio obligó también a reajustar el diseño exterior del robot, adaptando la carcasa a la nueva configuración mecánica.
Ruedas en lugar de piernas
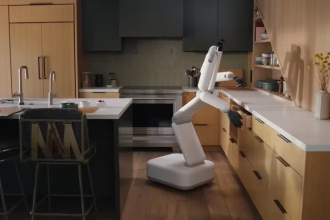
Lejos de buscar una réplica completa de la marcha humana, Memo combina brazos manipuladores con una base móvil con ruedas. La elección refleja una priorización clara por la manipulación frente a la locomoción.
Según la compañía, esta plataforma ofrece estabilidad pasiva, ya que no requiere consumo energético para mantenerse erguida ni presenta riesgo de caída ante un corte eléctrico. El diseño busca una mayor fiabilidad en entornos domésticos, donde la seguridad mecánica tiene más peso que la complejidad de un desplazamiento bípedo.
Ritmo de trabajo y control flexible
Otro punto observado tras su presentación ha sido la velocidad de ejecución. Aunque algunos vídeos mostraban secuencias aceleradas, en condiciones normales Memo opera al 75% de la velocidad de las trayectorias humanas usadas para su entrenamiento.
Durante la captura, los operadores se mueven de forma deliberadamente más lenta y estable para asegurar la calidad de los datos. El sistema integra un modelo de compliance que permite modular la respuesta:
- Aplica fuerza cuando la tarea lo exige.
- Reduce de inmediato la rigidez para operaciones delicadas.
Esta capacidad es clave para acciones de precisión manual, como la manipulación de tejidos o elementos frágiles.
Prueba de mercado con un programa beta
La hoja de ruta de Sunday Robotics contempla el lanzamiento en 2026 de un programa beta, denominado Founding Family, dirigido a usuarios tempranos. Memo se comercializará como producto físico, utilizando componentes estándar de la cadena industrial para contener costes, con la opción de incorporar habilidades adicionales mediante servicios complementarios.
Los participantes mantendrán una relación de prueba prolongada que incluirá mantenimiento periódico y actualizaciones constantes mientras se consolidan los niveles de fiabilidad. Aunque el robot ya ha mostrado capacidad de adaptación a entornos no previamente conocidos, esta fase se centrará en optimizar su rendimiento en distintas configuraciones domésticas.
Una estrategia pragmática
La apuesta de la empresa parte de una premisa clara: la escasez de datos de calidad sigue siendo uno de los principales frenos para llevar la robótica doméstica del laboratorio a la realidad cotidiana. Por eso decidió invertir primero en sistemas de captura antes de cerrar el diseño del producto.
En este proyecto, el guante no fue un accesorio, sino el núcleo de la iniciativa, y Memo terminó siendo la materialización física de una investigación que empezó mucho antes de que existiera el robot.